

关于我们
郑州(新郑市)恒凯电子科技有限公司是一家从事数据采集卡、运动控制芯片、运动控制卡及相关产品研发与销售的高科技公司。
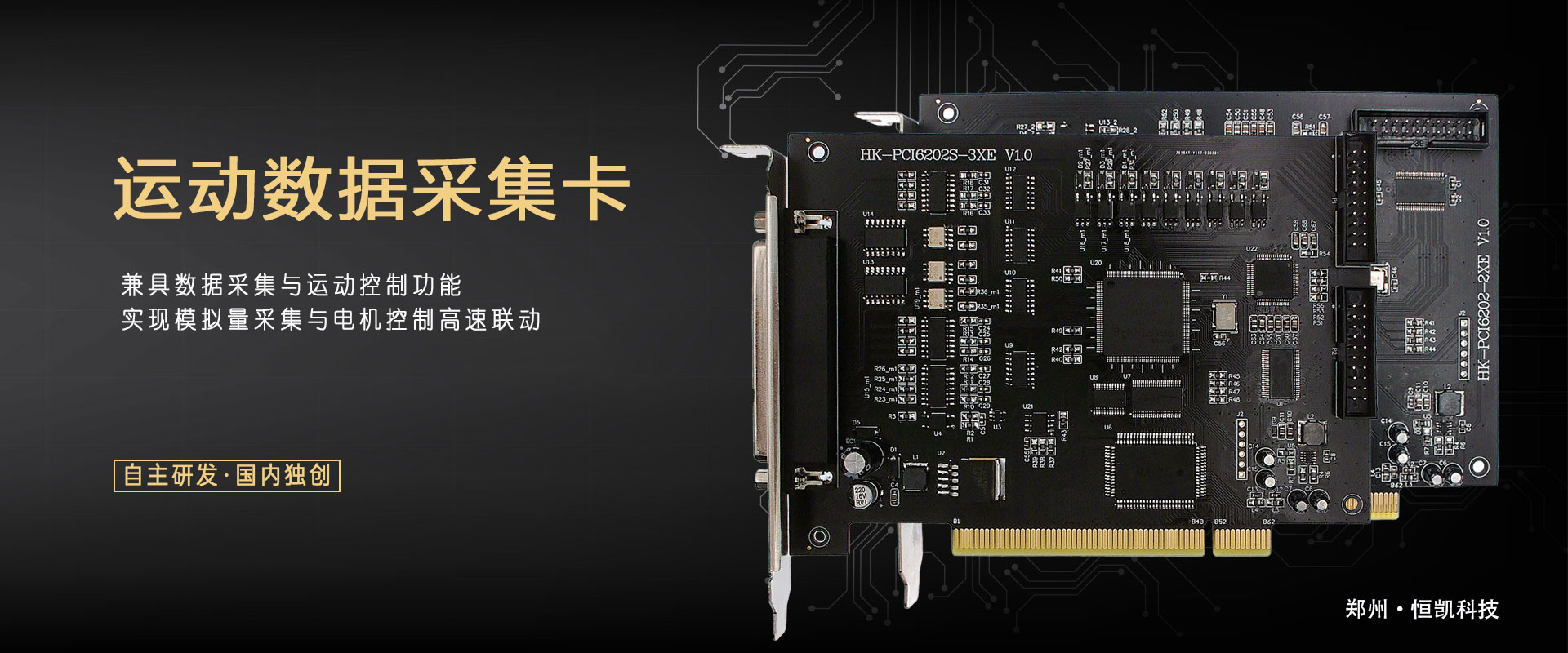
本公司拥有数据采集与运动控制双核心自主技术,研发有基于USB\PCI\PCIE\NET接口的多种功能板卡,有同步与非同步数据采集卡,数字IO卡等。也有基于自主运动控制核心开发的用于步进伺服电机控制的运动控制卡,脉冲+方向或者双脉冲输出,可适用于多数常见步进、伺服电机驱动器。更研发有集数据采集与运动控制功能一体的运动数据采集卡(兼具数据采集与电机控制功能),实现模拟量采集与电机控制,编码器同步计数测量,以及运动轴脉冲输出及编码器分频信号触发模拟量采集功能。
- 产品用心,前期对产品功能定义及目标用户群调研,上线后进行用户可用性测试。
- 服务贴心,提供板卡售后技术支持、质保一年
- 品牌知心,凭借对服务品质和商业价值的追求,赢得了众多国内外客户的信任。
- 我们专注于打造国产高品质数据采集与运动控制产品
- 团队数十年丰富的设计经验,专注于数据采集与运动控制领域
我们做什么
拥有数据采集与运动控制双自主核心技术,研发销售数据采集卡、运动控制卡、运动数据采集卡、运动控制核芯板、运动控制芯片、编码器卡等
我们的服务优势
数十年专注于数据采集与运动控制领域、经验丰富
充满活力的团队
拥有经验丰富技术团队,专业的资深设计师
产品类目

数据采集卡
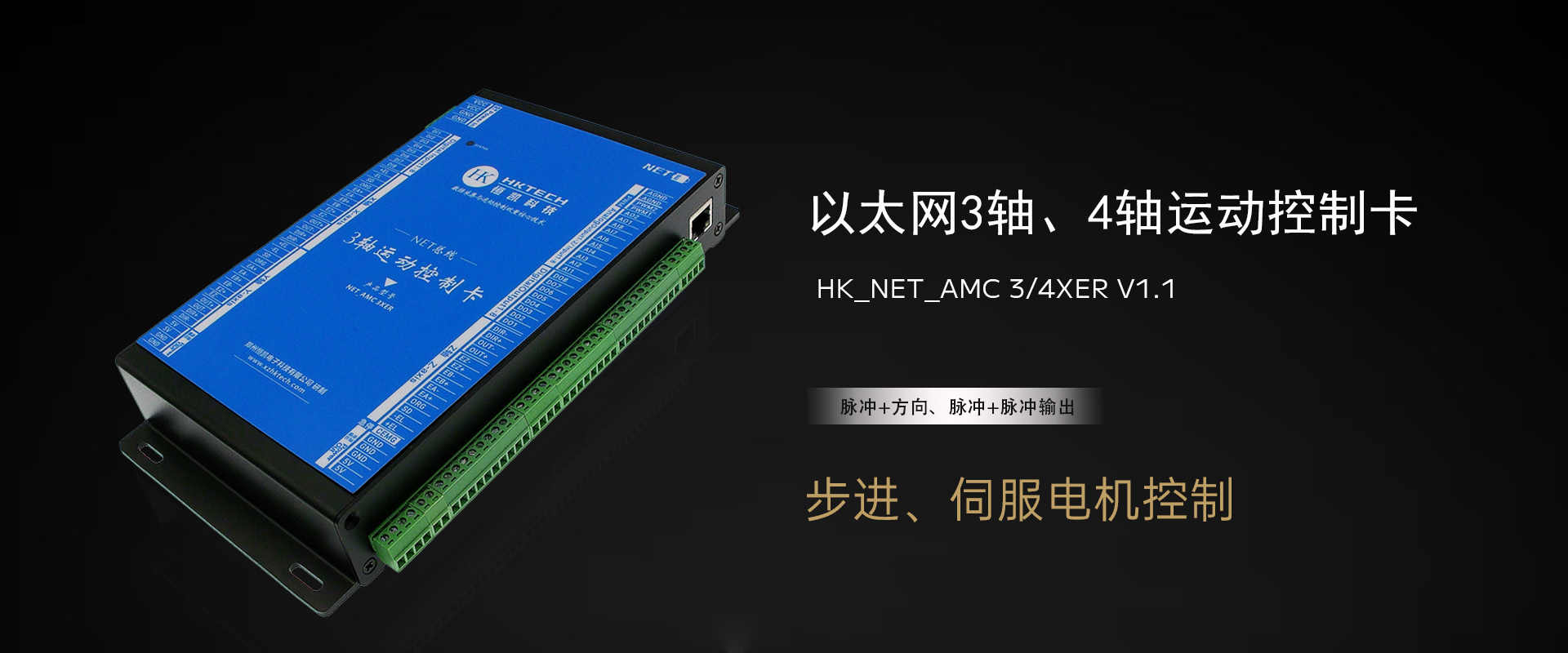
运动控制卡
运动数据采集卡
运动控制核芯板
数字IO卡
编码器计数器卡
产品中心
专业数据采集卡与运动控制解决方案
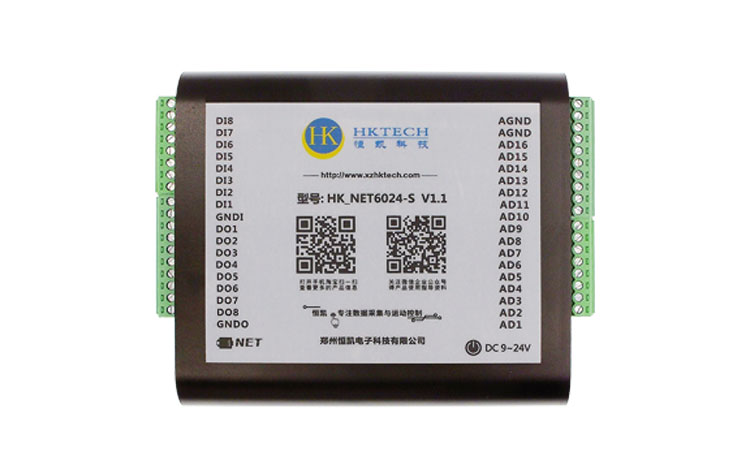
NET6024-S V1.1
以太网通讯,16路16位模拟量采集,每通道20K采样率,8路光电隔离数字信号输入、8路光电隔离数字信号输出。
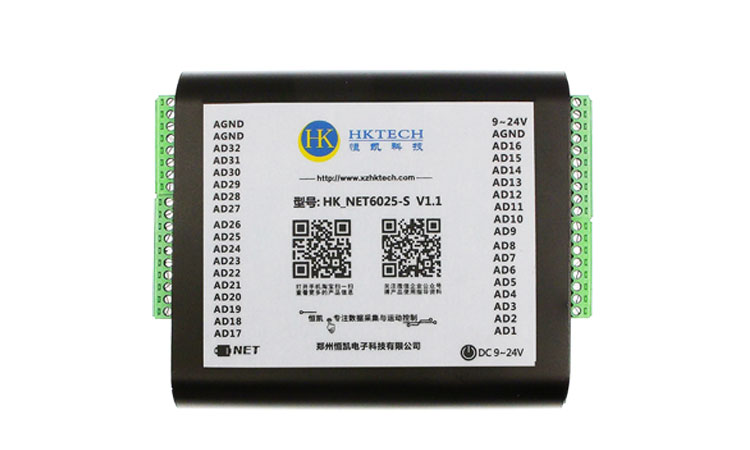
NET6025-S V1.1
以太网通讯,32路16位模拟量采集,每通道18K采样率。

NET6043-S V1.1
以太网通讯,8路16位模拟量采集,每通道40K采样率,2路DA输出,8路光电隔离数字信号输入、8路光电隔离数字信号输出。

NET32IO V1.1
以太网通讯接口数字IO卡,16路光电隔离数字信号输入、16路光电隔离数字信号输出。

NET_DAQ V1.2
以太网通讯接口,16路单端/8路差分模拟信号采集,2路DA输出,0-10V量程,1-1MHz输出频率,8路数字输入、8路数字输出,1路PWM测量,2路PWM输出,1路计数器。
上位机编程基础 教程
查看更多


- 精英研发团队
- 先进生产设备
- 出厂精密测试
- 大客户OEM定制
产品选型
根据自己的项目需求,选择合适的板卡